You probably all wondered why there was so little news in the last weeks. One reason was that I was on holidays. I was off for a week to the Red Sea for diving. The second reason was that everyone was very busy in the last days and weeks.
Since there was a lot of progress, but no time to document it all, I will blog here about it, without going into too much detail.
Our hardware developers were busy all the time and fiddled with the last design changes of the new NG hardware. It includes numerous fixes and extensions! They did smashing work redesigning the hardware 0.20!
In essence it has become a 3 processor system using the LPC2148 as the main processor running the closed-loop control and having a Atmel 644p and a Atmel 168 as peripherial processors for preprocessing and communication purposes.The main CPU no longer does any measurements itself. It uses peripherial processors or external ADCs for that.
Besides 16bit ADC and new filters for the gyros, we included an air pressure sensor and a compass sensor in the new design. We will support ADXR and MLX gyros. The new hardware has 4 (or even 5) UARTs on different processors and will support the ACT DSL protocol on several of them. This will allow arbitrary ACT receivers (SPCM, PPM, 2.4Ghz) to work with the NG. Furthermore the UARTs will support the NMEA GPS protocoll besides the normal shell access and will allow to attach all sorts of NMEA compatible GPS to them.
In the last weeks our hardware developers cleaned up the new design and fixed the last bugs. They generated Gerber files and panelized them with the help of our board producer.
This week we finally were able to start production of our first alpha boards of the new hardware 0.20. If all goes well, we will receive the first prototypes within the next two weeks!
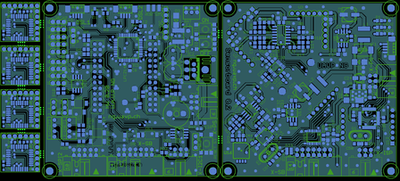
The above shows parts of the Gerber files of the two layer panel for the new hardware 0.20. It consists of a flight control board, a sensor board and four breakout boards for MLX gyros.
When we receive the new boards, the huge work of porting the old 0.10 software and writing new software for the additional processors can start.
![[Sitemap]](/site/images/sitemap "The sitemap of this site")
![[Valid RSS]](/site/images/rss-valid "Validate my RSS feed")
![[Valid Atom 1.0]](/site/images/atom-valid "Validate my Atom 1.0 feed")
![[Valid RSS]](/site/images/css-valid "RSS feed")