Welcome back to my blog, esteemed reader!
Let's see what has happened since my last blog post end of 2012...
In december 2012 the whole UAVP-NG team meet at the 29. Chaos Communication Congress in Hamburg. It was a great event with many interesting talks. Many of our pilots, beta-testers and developers joined the UAVP-NG assembly and we had a lot of fine discussions, hacking, talks and fun. Many visitors came by at the assembly and all of our developers and beta-testers were constantly explaining and showing our new hardware HW-0.24-mini-r1 and the NGOS software.

Our team started to design a new hardware revision, called HW-0.30 at 29c3. Volker, one of our hardware head developers, took the project lead. We discussed and designed the features of the new hardware revision during the 4 days the congress lasted. Having defined most of the feature set the real design work on the new hardware revision was done later in early spring by Volker together with Ben and Martin.
In early May the 9. UAVP-NG Developer Meeting took place in Zurich, Switzerland. Sadly we had bad luck with the weather and we got rain for most of the 4 days. On the other hand this gave us a lot of time to discuss the HW-0.30 design and our hardware team verified the new design pin by pin and chip by chip. In the night I myself did two long hour talks on NGOS and it's implementation for my fellow developers. The design of the new hardware had already progressed a lot and the new design looked promising.

You can find some impressions of the event here: 9. NG Developer Meeting in Zurich (2013)
Later on in July Martin invited us to the 10. UAVP-NG Developer Meeting, which took place in Gruenstadt, Germany. The weather was wonderful and we enjoyed two great flight days. The design of the new HW-0.30 was nearing completion and we started to plan production of the first prototypes.
This fall, we implemented a new fully autonomious looping function in NGOS which Christi, one of our developers, implemented while doing a lot of crash intensive testing. It essentially allows you to do fully autonomious loopings on the press of a button. Over time the new looping function was perfected and Ralf, another of our developers, demonstrated the new feature in a great movie some days ago.
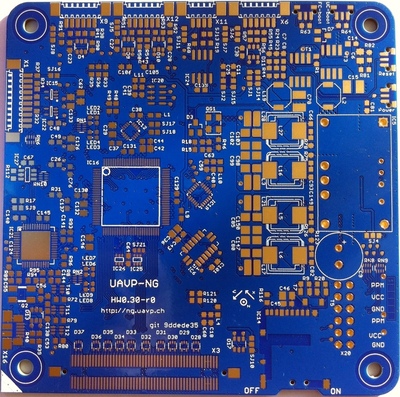
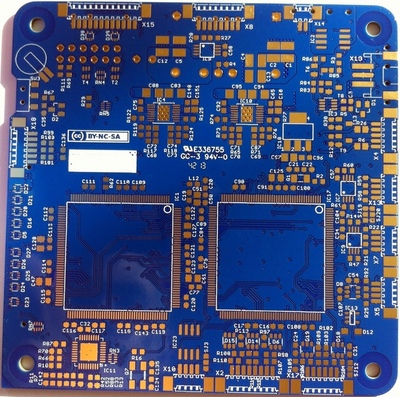
End of september we finally ordered the first HW-0.30-r0 prototypes. The board will feature two STM32F4 CPUs with a dual-port RAM in between them allowing both CPUs to have near realtime sensory data and synchronisation. It will support a CAN bus ring additionally to the I2C bus for BLCs. A lot more improvements were incoperated and I will post more on this in a later post.
The first HW-0.30-r0 prototype PCB arrived today. Here are the first pictures of the new board...
The top of HW-0.30-r0:
The bottom of HW-0.30-r0:
We plan to design a HW-0.30-mini later on, when the HW-0.30 design has been stabilized and has proven itself. The HW-0.30-mini will contain only one of the STM32F4 CPUs and will not use a dual port RAM. This will allow to build it with a 55x55mm footprint similar to the earlier HW-0.24-mini and HW-0.22-mini PCBs. It will provide a nice upgrade path for all our HW-0.24-mini and HW-0.22-mini pilots.
The HW-0.30-r0 prototypes will now be delivered to our developers and we can hope to see fully assembled HW-0.30-r0 boards soon. If we are lucky and our software developers find time for the final touches on the NGOS STM32 port we will eventually see the first prototype get airborne at the 30C3 - The 30. Chaos Communication Congress in Hamburg where all developers will meet again for the UAVP-NG Developer Meeting at 30C3.
If you are interested in the UAVP-NG and live near Hamburg, make sure to visit us between the 27. and 30. december at the 30C3 in Hamburg!
![[Sitemap]](/site/images/sitemap "The sitemap of this site")
![[Valid RSS]](/site/images/rss-valid "Validate my RSS feed")
![[Valid Atom 1.0]](/site/images/atom-valid "Validate my Atom 1.0 feed")
![[Valid RSS]](/site/images/css-valid "RSS feed")