And again it's getting winter and I've not updated my blog for too long. ;) Let's change that...
At last year's 28c3 Chaos Communication Congress the UAVP-NG developer team succeeded to get (our back then brand new hardware) HW-0.23-mini-r0 airborne.
The new hardware - designed by Volker and Ben, two of our NG developers - no longer contains analog sensor technology but instad uses modern 3D digital sensor chips. This gave enough room to include the GPS sensor on-board. We also designed a GPS antenna perfectly suited to be mounted on top of the flight control.

In spring 2012 the 7. UAVP-NG Developer Meeting took place in Heidelberg. It was a great event - we were very lucky with the weather - and lot's of folks showed up. We all had a lot of fun and had great 4 days. Thanks to Volker & Ben again for making that great location available to us!

After 28c3 Ralf, one of our NG developers, started designing the new NGblc-4mini-r0, a quad-BLC for small Mini-NGs. His first design was airborne in spring 2012. After testing serveral smaller design changes were done and a NGblc-4mini-r1 was produced and tested successfully.
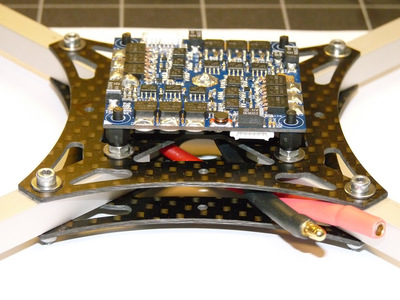
Small changes in print and a footprint error resulted in a NGblc-4mini-r2 design which we will produce now and hope to have ready for the 29c3 congress at the end of this year.
Besides that we started testing the new HW-0.23-mini-r0 in spring 2012 and we had to find out that the combined gyro/accelerometer called MPU6000 has a shortcoming: It only contains one filter set for both, the gyro and the accelerometer. As both sensor have opposing filter requirements in our application, we concluded that it would be nicer to have an additional accelerometer.
In our new hardware design HW-0.24-mini-r0 which we designed over summer 2012 we include a secondary additional footprint for a second (optional) accelerometer. We choose the proven accelerometer we used in previous designs. Furthermore we added a antenna PCB allowing everyone to build flight control sized GPS antennas perfectly suited to be mounted on top of the flight control.
HW-0.24-mini-r0 got airborne some weeks ago. Except for small textual fixes which we will incoperate in HW-0.24-mini-r1 everything worked out fine! We hope to have HW-0.24-mini-r1 with us for 29c3.
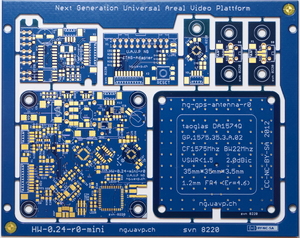
As you can see the new HW-0.24-mini-r0 includes the flight control PCB, a GPS antenna PCB with the same size as the flight control, the Cam/RC controller PCB, an external compass PCB, a JTAG connector PCB and two push button PCB.
Besides all the above some of our developers took the time to design NGlight, a small I2C peripherial devices to the flight controll allowing control of 16 PWM LED channels for control of RGB leds. It allows you to control different colors of 5 RGB LEDs while choosing the color in a range of 0.255 for each of the 5x 3 RGB channels.
Last but not least I should mention our UAVP-NG assembly at the 29c3 Chaos Communication Congress 2012 in Hamburg. If you live near Hamburg feel free to visit us from 26.12.2012 to 30.12.2012 at the congress!
![[Sitemap]](/site/images/sitemap "The sitemap of this site")
![[Valid RSS]](/site/images/rss-valid "Validate my RSS feed")
![[Valid Atom 1.0]](/site/images/atom-valid "Validate my Atom 1.0 feed")
![[Valid RSS]](/site/images/css-valid "RSS feed")