I would like to tell you more about our new project called Next Generation UAVP.
Last summer we realized that the resources of the original UAVP were not up to the task of realizing our UAV dreams. The used PIC processor had not enough RAM and Flash ROM, was too slow for further communication tasks and had neighter the resources nor the ports to extend the design to a next level.
Looking around we realized that no of the current UAV projects were powerful enough for what we had in mind. Soon the idea of a new project using better more powerful hardware, a bigger processor and a more modular aproach was born. Since none of the orginal authors wanted to move to a new processor architecture we had to build up a new developer team.
Late last summer we started the new project. Together with MrSputnik (Michael Buhr) and Mixer (Michael Sachs) I started drawing a new flight control board and sensor board design. Soon MrSputnik who had a lot more experience in designing hardware took over and finished the design of the first hardware revision in november last year.
At the same time I started hacking the new flight control software. Soon MrSputnik and TobiHH started helping me and for a long while I just hacked on the software framework.
Instad of implementing a straight forward code I tried to design a real modular software framework which allows to implement different flight control algorithms at the same time.
The framework allows the user to switch between the different algorithms. Further operating system like features were implemented. In the end this all resulted in a NG Operating System which gets operated via console commands.
Late december last year, we started realizing the HW-0.10 PCBs. MrSputnik was the first to finish a NG flight control. Some days later I finished mine.
My first "NG tower", meaning flight control, sensor board and Foxboard carrier board looks like this:
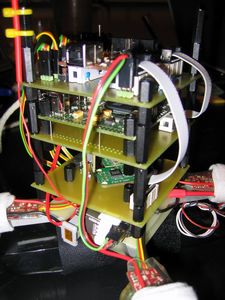
As you can see above, the FC became quite big. The reason for this is that the boards are drawn for discrete parts! This allows fast soldering and easy tests and changes. Further boards will become SMD and will use a lot less space than the current HW-0.10.
After finishing the first NG FCs it did not take long and we got airborne... ... On the 24.01.2008 the first NG was flying!
The whole construct does not yet look very sexy, but it's very very stable in the air! It's closed-loop control has a cycle time of 1ms! This results in a control frequency of 1kHz. Most of the control algorithms use Kalman filters for sensor data fusion. Our PID controllers use backstepping to be stable even under severe conditions.

If you got interested in our new project, be sure to hop over to our new NG site, where you will find more pictures, movies and news!
The above is a very short abstract of what was done. The NG operating system looks quite different than current FC softwares used in other projects! We implemented a lot of new features not yet seen on other UAV projects before.
I will tell you more about the NG in my next articles!
![[Sitemap]](/site/images/sitemap "The sitemap of this site")
![[Valid RSS]](/site/images/rss-valid "Validate my RSS feed")
![[Valid Atom 1.0]](/site/images/atom-valid "Validate my Atom 1.0 feed")
![[Valid RSS]](/site/images/css-valid "RSS feed")